Waterborne Rescue Vessel
Objective
For ENGG 200, we built a remote-controlled twin-hull rescue vessel that had to carry payload, stay upright in water, keep electronics dry, and weave through obstacles in a test pool. Every revision came back to the same question: will this still float, seal, and steer after we print it?


Development Timeline
Four major iterations from concept sketch to pool-validated prototype.
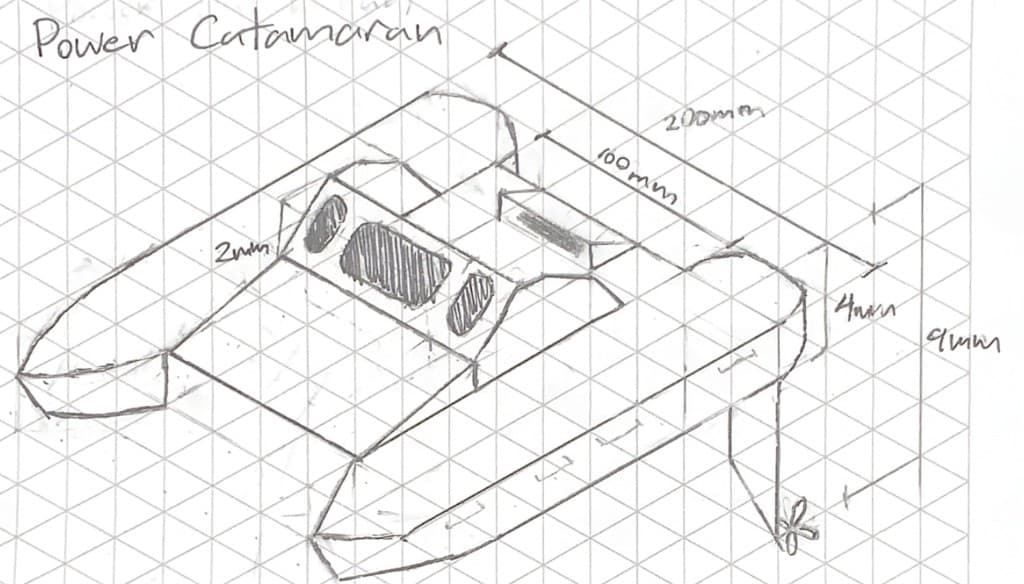
Concept & Layout
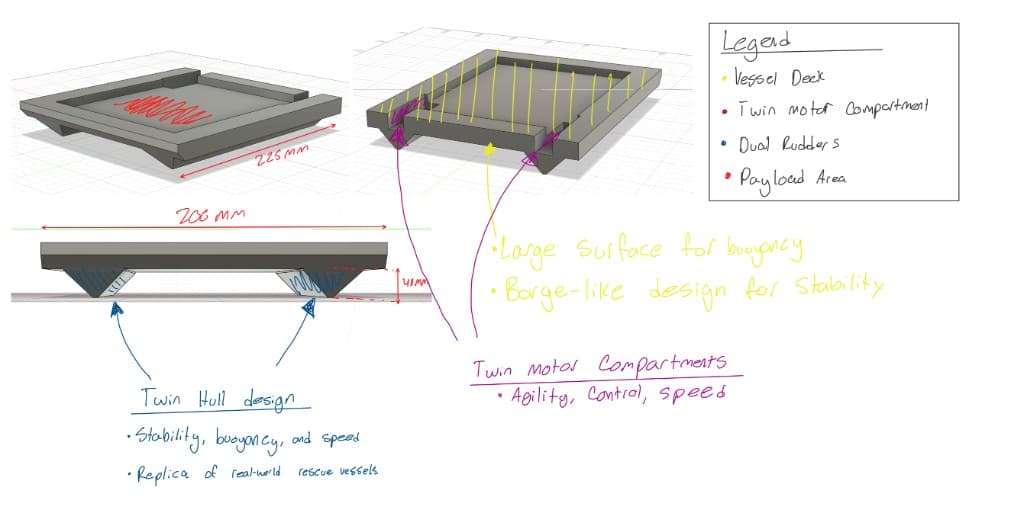
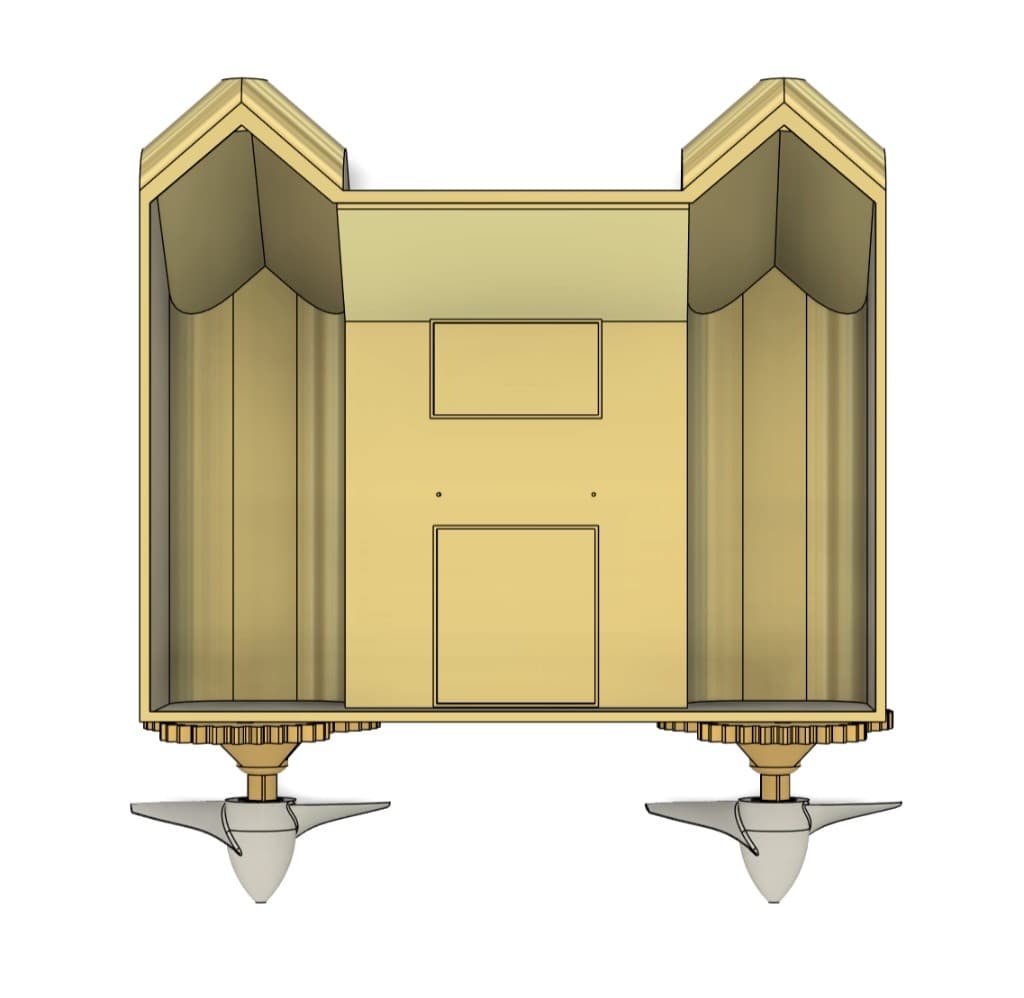
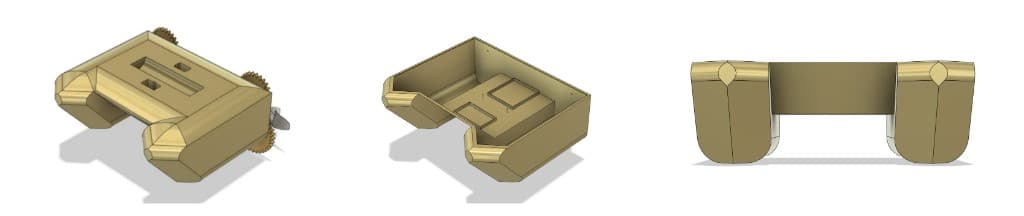
Established twin-hull geometry, payload zone, and motor pod placement in Fusion 360 before committing filament to a first print.
What changed
- Twin-hull catamaran layout with defined payload deck
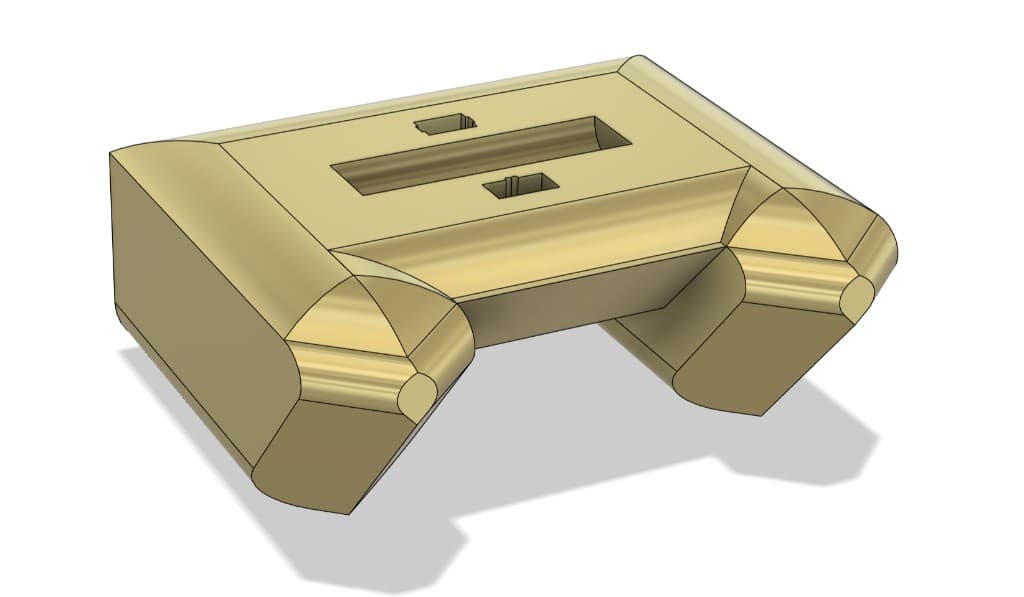
- Motor pod and electronics compartment planning
- Electrical routing concept and wire tunnel paths
What improved
- Clear design direction and rescue-vessel proportions
- Compartment sizing resolved before physical build
Issues & fixes
- No physical validation, buoyancy assumptions untested
- Print volume limits not yet stress-tested on real geometry
Design & Planning
Early CAD and planning before committing to prints.
Early layouts defined hull geometry, waterproof compartments, payload space, and propulsion placement before committing to prints.
Sketches
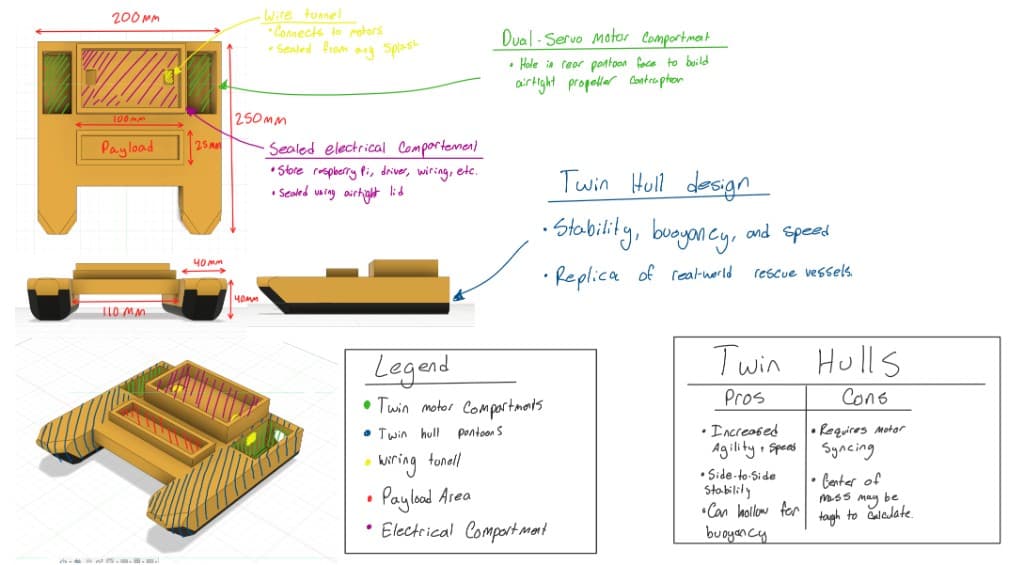
- Initial concept sketch, twin hulls, deck space, proportions
- Sealed electronics and motor pod compartment plan
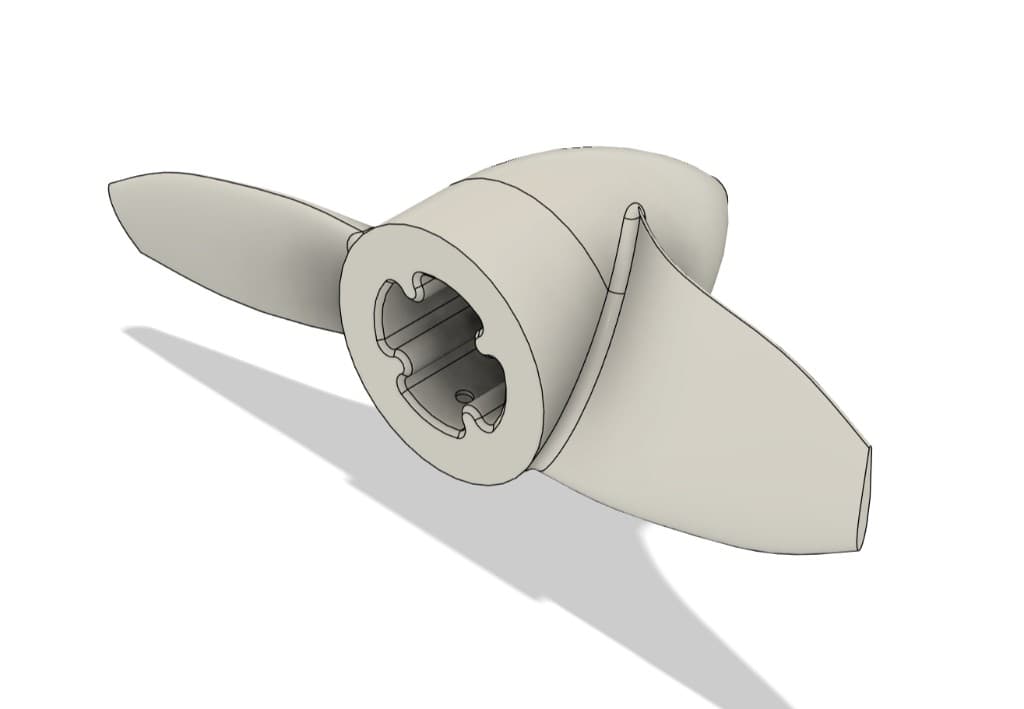
- Propeller geometry compared before printing variants
CAD Developments


Build Process
From printed parts to wired, assembled prototype.
From printed parts through wiring, propulsion tuning, and team assembly in the makerspace.
Makerspace Assembly
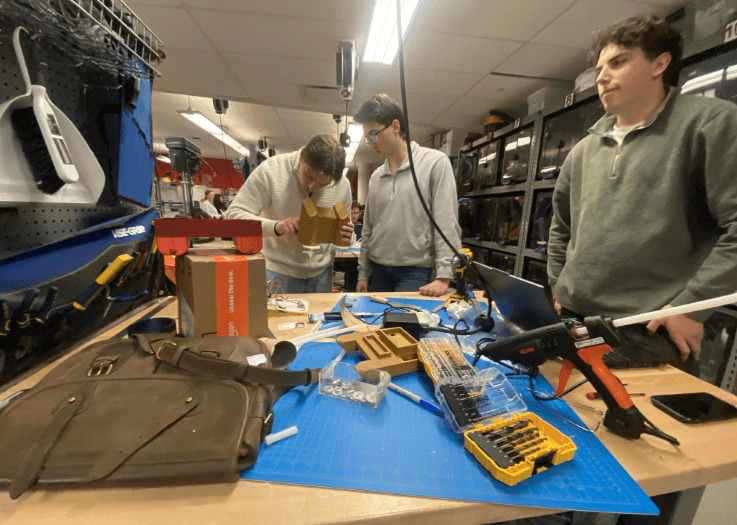

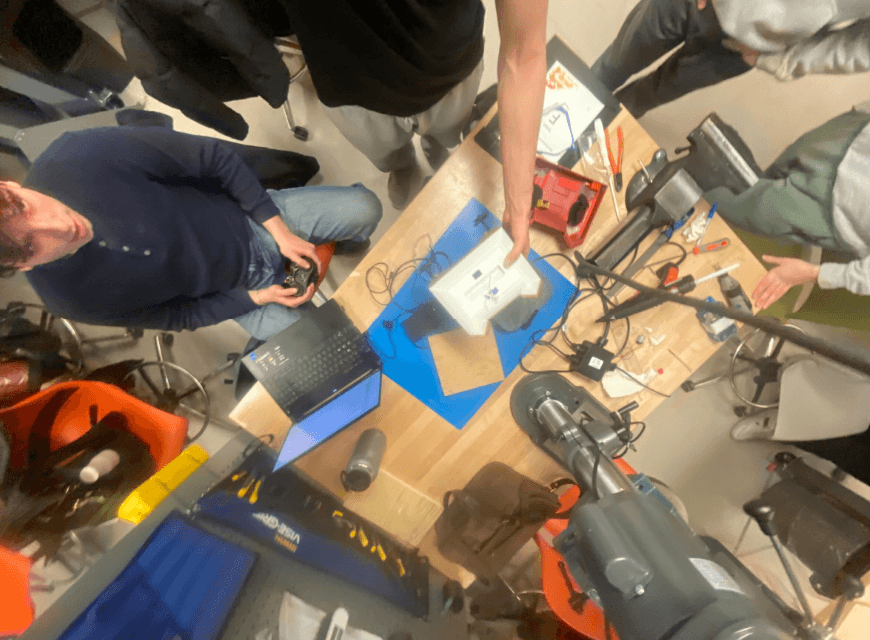
- Fitting printed hull sections and checking assembly as a team
- Hull components and clearances checked in the makerspace
- Controller, laptop, and hull wiring set up at the workbench
Propulsion & Electronics
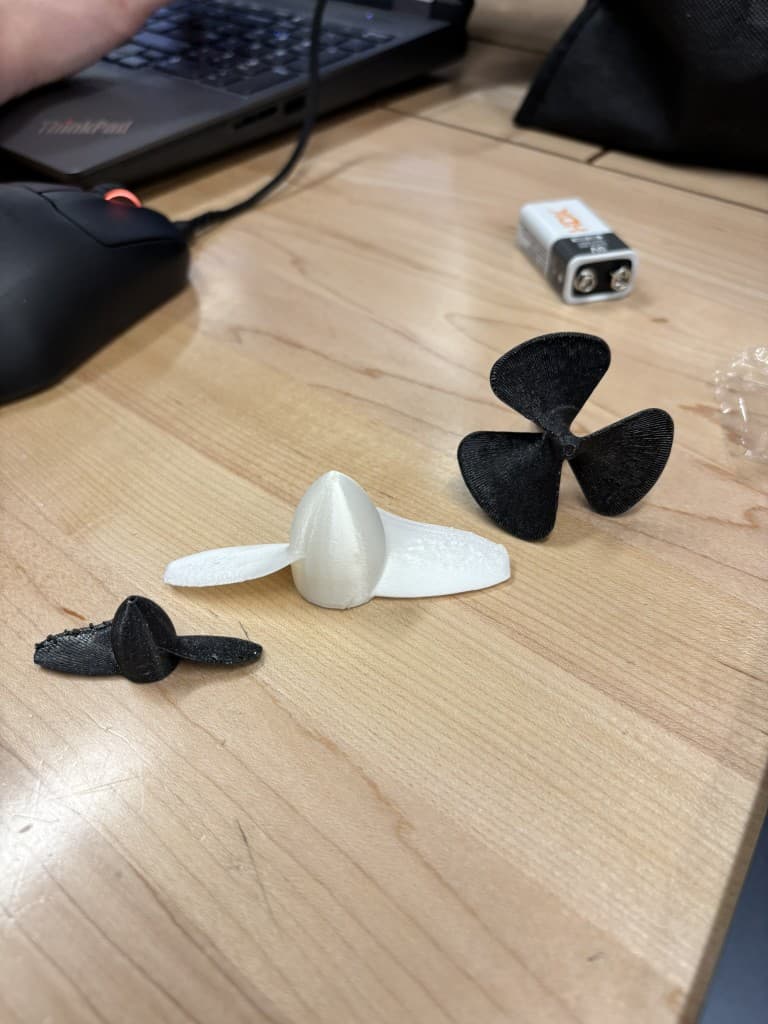
- Propeller variants compared on the bench before thrust selection
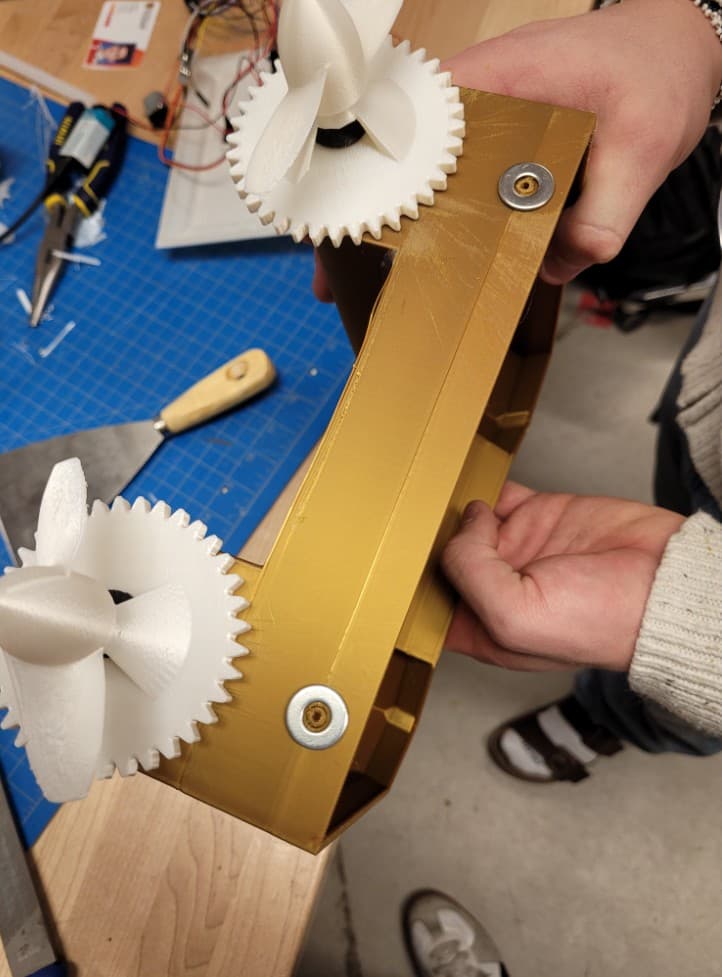
- Geared drive, printed gears and propellers mounted on the hull frame
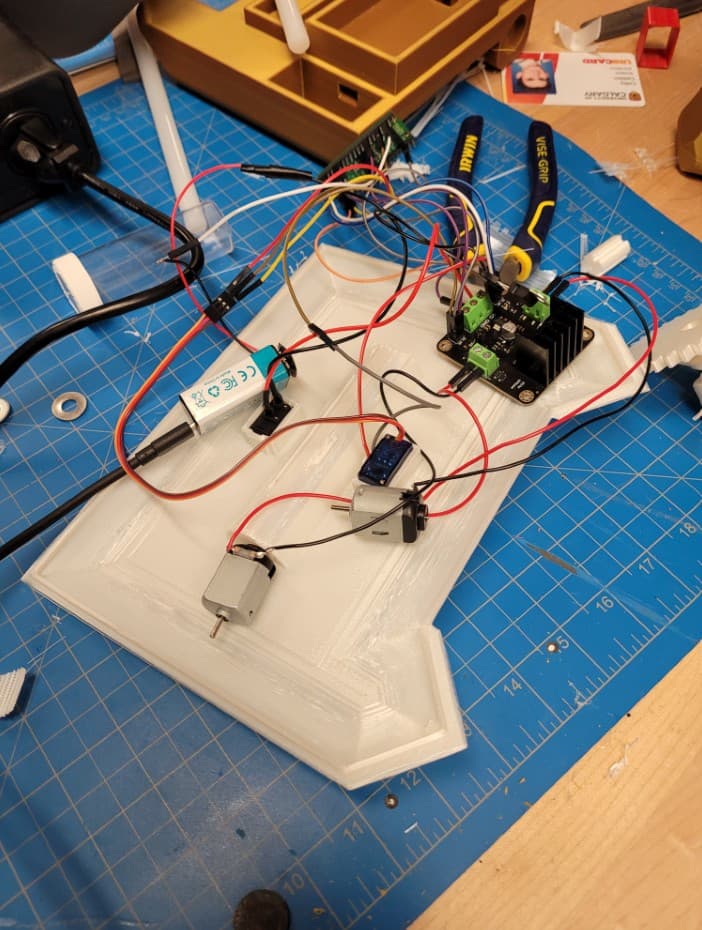
- Motors, driver board, and battery routing on the printed base
- Bench propulsion check with motors and propellers running
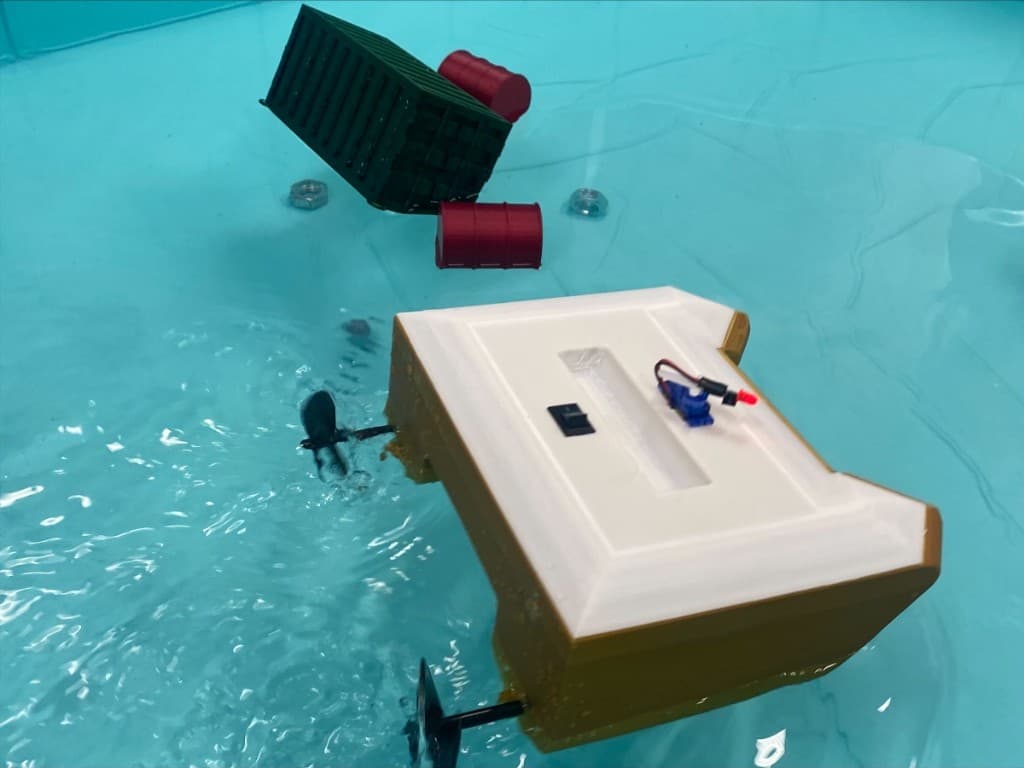
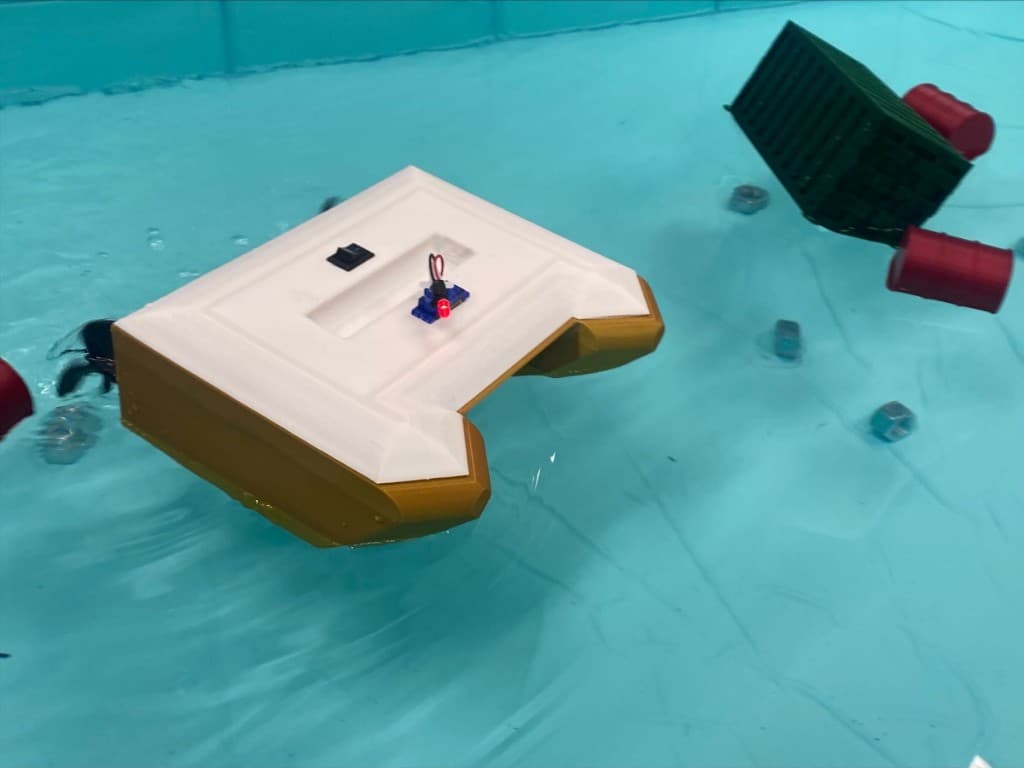
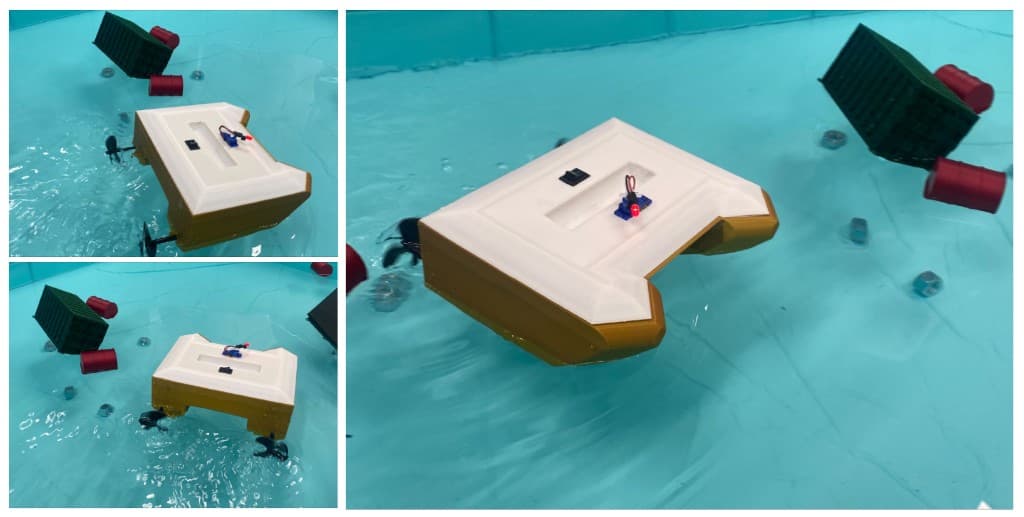
Testing & Validation
Pool validation and iteration feedback loops.
Each revision tested buoyancy, waterproofing, thrust, and internal volume. Failures from one version directly drove the next CAD pass.
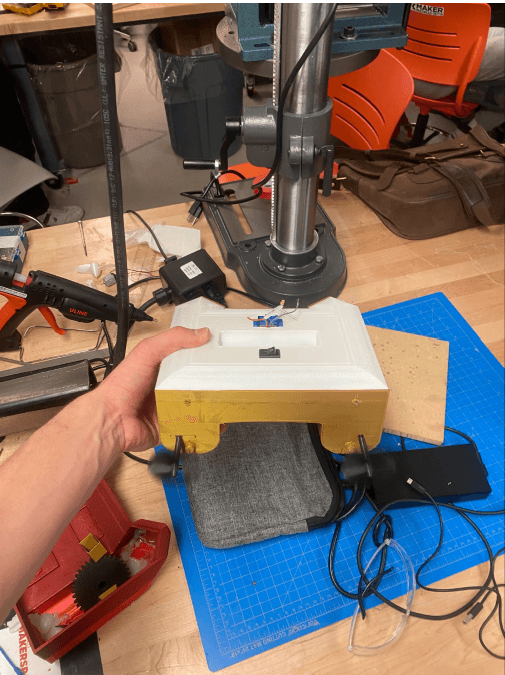
- Controlled buoyancy test before full electronics validation
- Waterproofing checks at hull-roof seam under splash conditions
- In-pool obstacle course for steering, thrust, and stability